


This project was part of my work working at the Autonomous Systems Lab @ NEDUET now a part of National Center of Robotics and Automation (NCRA).
The main objective of this project was to build a mobile assistive social robot for education. The target audience for this project were students
in remote tribal/rural areas of Pakistan and students with Autism.
Literacy rate of Pakistan in general, and literacy rate for females in tribal and rural areas in particular have been declining at an alarming rate
for the past 2 decades (and these numbers weren't very encouraging to start with). Although various Governments and international organizations
(including US, UK, Canada, EU, UNICEF, etc.) have made unrelenting efforts to aid the Pakistani Government to bolster female education, but still the
results have not been too encouraging. The major predicament is the tribal ideology of gender seggregation, where a male teacher is not permitted to teach
a female student and vice versa, which causes almost 95% of these young female students to drop out of schools right after completing primary school.
As engineers, and a staunch supporter for female education we decided to pursue this problem from an engineering perspective. We designed a mobile robotic
telepresence robot, both capable of being teleoperated and autonomous motion to be deployed in such remote institutes having pre-recorded lecture scripts to
deliver the study material in a more interactive manner.
Similarly, those students diagnosed with Autism have virtually no future if they hail from a middle-class family in Pakistan. The institutions that do exist
are till middle class, after which there is a proverbial "death" of their education and career. Hence, our robot had aimed to mitigate this gap by providing a
socially interactive platform for such student to learn and excel.
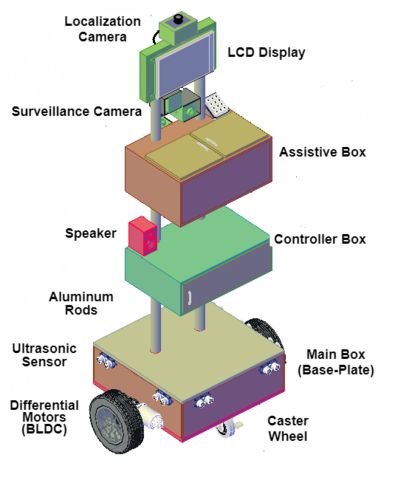
Sylvester was designed from scratch and is currently being used as an active robot in the lab to extend our efforts to progress our mission for accessible education for all in Pakistan.
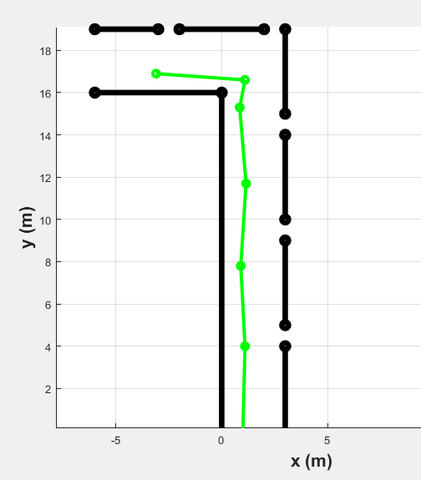
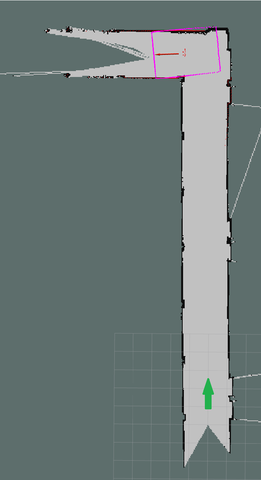
Technically, this robot employed the use of Lidar, Camera, Ultrasonic sensors, IMUs and Rotational Encoders to localize itself using Extended Kalman Filter (in addition
to having experimented on using visual-inertial odometry for localizaiton), and avoid any obstacles while traversal of departmental hallways. The robotic platform also had
a 12" LCD screen which acted as an interactive face of the robot. For our efforts for this project, we were able to secure a funding from Higher Education Commission Pakistan
(HEC-NRPU-6061 research grant).